
Much recent focus in the sensors arena has been on remote monitoring, mainly in the form of wireless networks. Another very important application of sensors (wireless or otherwise) is in real-time control, where the information collected by the sensor is used to determine the direction in which to steer some external process, such as the temperature of a furnace or the control surfaces of an aircraft.
 Ed Ramsden |
Control Loops and Process Variables
The basis of any control system is a control loop in which some characteristic of a process of interest is monitored by some kind of sensor, and that information is used to direct an actuator that has control over the process. From a 35,000 ft. perspective, a typical control loop can be described by the block diagram of Figure 1.
 Figure 1. |
The process is what you want to control—specifically, you want to control some characteristic of the process known as the process variable. For a furnace, one process variable would be temperature. To monitor this process variable usually requires a sensor. The set point is the value at which you would like the controller to maintain the process variable, and this is supplied by the user. The controller is a circuit (increasingly implemented with a microprocessor) that interprets an error signal that is derived from set point and monitor data, and uses that signal to control the actuator. In the case of a furnace, the actuator might be a set of gas valves and dampers. One key feature of a control loop is negative feedback, meaning that an increase in the monitored variable should ultimately result in a response by the actuator to reduce it. In the case of complex control systems, there can be multiple interrelated process variables, monitors, set points, and actuators.
A Temperature Controller Example
The above description is pretty generic, so let's consider a simple but concrete example—a temperature controller. Figure 2 shows the schematic. The process is an object that must be maintained at a given temperature, which means that temperature will be our process variable (Tp). Thermistor R1 is used to sense this temperature and is in a half-bridge arrangement with variable resistor R2, which is used to provide the set point (Ts). Because R1 has a negative temperature coefficient, the voltage at the connection of R1 and R2 will increase with temperature. In this circuit, this voltage (Verror) is the error signal, as it is greater than Vref/2 when Tp>Ts, and less than Vref/2 when Tp<Ts. In this scheme, the set point resistance R2 is determined by matching it to the resistance of thermistor R1. For example, if a set point of 40°C is desired, and R1 has a resistance of 2 kV at 40°, then R2 gets adjusted to 2 kV.
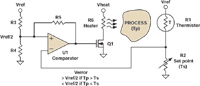 Figure 2. |
The Actuator
The "brains" of the controller is an analog comparator U1. When the error signal is less than Vref/2, the comparator's output goes high and turns on the MOSFET (Q1), and, subsequently, the heater resistor (R6). When the error signal is greater than Vref/2, the comparator turns off the heater.
What if Tp = Ts ? In the worst case, the actuator would either cycle on and off quickly (oscillate), or operate in linear mode. While neither of these cases may result in damage to the resistive heating element, the power MOSFET is likely to be in for some abuse. For this kind of actuator, it is important that it really be completely on or completely off.
This is what R5 is there for. It provides a small amount of hysteresis, meaning that to turn off the heater, Verror must exceed Vref/2 by a small amount, and to turn it back on again, Verror must drop below Vref/2. While this reduces fast oscillation, it results in the process variable's bobbing up and down around the set point over time (Figure 3).
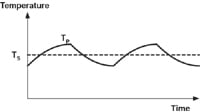 Figure 3. |
How much hysteresis you need (and can live with) is a function of the process requirements and control system. For example, the temperature in my living room should be stable within a few degrees for comfort, so the furnace controller had better not have too much hysteresis.
On the other side of the argument, turning on the furnace involves a starting cycle, and associated wear and tear, so there is a balance between comfort and reliability.
Next month's column will take up circumstances where even well-defined and well-controlled oscillation would be completely unacceptable.
Ed Ramsden, BSEE, a member of the Sensors Editorial Advisory Board, designs sensors for the heavy-truck industry in Portland, OR.