

The rapid and continuous introduction of many new sensor technologies is playing a central role in the development of next-generation industrial robots and the birth of the consumer robot. A multitude of new and innovative sensor technology types, along with state-of-the-art processor technology and supporting software intelligence, including artificial intelligence, are enabling both industrial and consumer robots to perform far more useful work and intricate tasks than ever before.
New sensor technology, for example, is enabling robots to much more accurately see and sense their surroundings and to more precisely perform tasks and avoid obstacles, including people. Similarly, the integration of unique force and tactile sensors are enabling robots to have improved touch and feel capabilities that allow them to perform tasks that are more precise and operate more safely.
Though there is a growing multitude of new sensor types that can and are being incorporated into different robot types, depending on the application, there are four key sensor technologies that are fundamental to nearly every new industrial and consumer robot being developed today.
Prolific Use Of Magnetic Rotary Position Sensors For Robot Joint Motors
One essential feature in all robots is the electro-mechanical joint. Though the number of joints required may vary per the robot type, virtually every robot has at least one joint in it, with most having several or more. For example, a collaborative robot typically has two arms/elbows and a waist, and humanoid and biped robots typically have wrist, elbow, ankle, knee, head, and hip joints. In each one of these joints is a motor that is controlled by a processor, and instrumental in the software intelligence to precisely move the motor and associated limb, are magnetic rotary position sensors for providing motor position and joint position feedback.
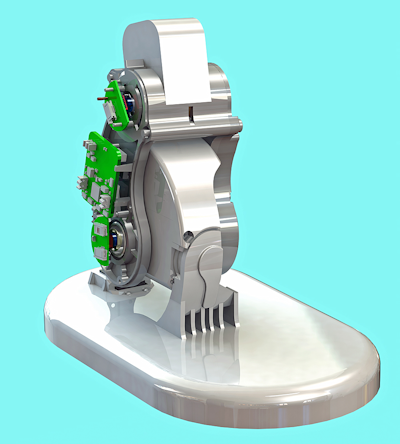
One view of a robotic leg.
Magnetic rotary position sensors have become the go-to motor position feedback sensor due to their extremely small size, lower power consumption and cost, high accuracy, and ability to work in harsh environments. Consequently, magnetic rotary position sensors for motor control feedback have been rapidly replacing their larger and expensive resolver and optical encoder counterparts, as well as multi-discrete hall and resistive sensor competitive solutions.
Next page
Due to magnetic rotary position sensors' high accuracy and small footprint, they are enabling robots to have much improved limb and joint agility, dexterity, and precision. Thus they are empowering robots to have improved mobility and maneuverability in picking up items and performing more intricate tasks. In addition, with their improved limb and joint movement, new consumer/social robots can more closely resemble humans in their physical appearance and actions, which helps to remove barriers humans have with seeing and using these types of robots in the home and workplace.
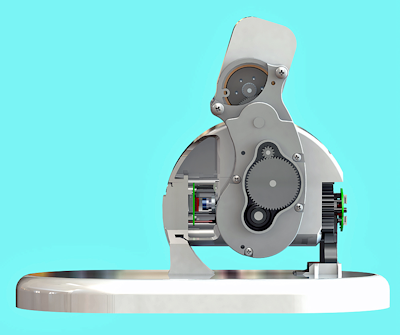
Flexed robotic leg joint.
With their better cost effectiveness and lower current requirements, magnetic rotary position sensors also play a significant role in reducing overall robot BOM costs and power requirements. Moreover, with their small footprint requirements and ability to operate in harsh environments, magnetic rotary position sensors enable robots to be smaller and lighter, and more resilient in extreme working conditions. And with magnetic rotary position sensors, they are uniquely immune to magnetic stray fields, thus providing higher robot reliability and safety even in the noisiest of magnetic environments, an often important requirement in industrial robot applications.
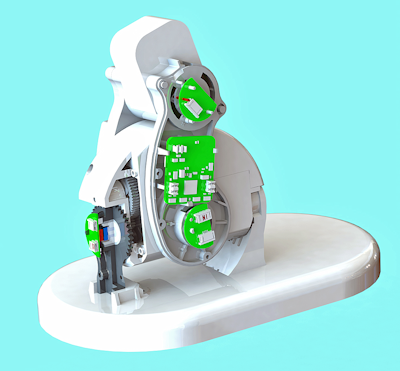
Full view of a robotic leg.
Next page
Spatial Sensor Technology Playing A Vital Role In Next-Generation Robots
Spatial sensing plays a crucial function in robotics, and vision sensing is at the top of the robot spatial sensor pyramid. Robotic vision, and the high performance cameras that facilitate it, aid robots in navigation, obstacle avoidance, and object identification. New 2D and 3D vision sensing technology also allows robots to operate more safely and reliably, and ultimately enables them to be more productive.
Today's advanced CMOS image sensor technology is playing a major role in achieving state-of-the-art robotic vision sensing by providing high dynamic, high resolution and undistorted images. For example, CMOS image sensor products offer high resolution, and high dynamic range for difficult light situations, and support frame rates up to 8K for movie recording quality.
2D cameras have been employed for years in the industrial robotic space, and due to their relatively low cost, they are also being employed prolifically in the emerging consumer robot space. 2D vision systems, for example, are commonplace in industrial robots as they are used for detecting parts on a conveyor belt and sensing the presence or movement of people or other objects in the robot's field of view. Similarly, they are being employed for the same functions in the consumer robot market.
New optical 3D robot vision stereo sensor technology is also becoming increasingly integrated into both industrial and consumer robots. They provide a three-dimensional map of a robot's surroundings and enable robots to move, operate and perform tasks better and more safely in a three dimensional space. Like 2D vision systems they can be mounted in either stationary or mobile applications, e.g., on the end of a robot arm.
3D stereo sensors are realized using either laser scanners, e.g. LIDAR, or by situating two traditional 2D video cameras at different angles to one another. This latter 3D stereo sensor type potentially offers the greatest deal of promise, because costly laser technology is not required.
Ultrasonic sensors are also used heavily in robots for spatial awareness. In particular, they are used for near-field navigation and obstacle avoidance, and to improve overall robot performance and safety. They play an important role in many mobile robots, including robot vacuum cleaners, for preventing them from bumping into walls and objects, humans, and from damaging property.
Ultrasonic sensors have a limited range that varies typically from about 1 cm to a couple of meters, and have a maximum direction cone of approximately 30 degrees. They are relatively low cost and have good accuracy at close ranges, but their accuracy drops off with increasing range and measurement angle. They are also susceptible to temperature and pressure changes, and interference from other nearby robots using ultrasonic sensors tuned to the same frequencies.
Magnetic position sensors are also playing a role in the advancement of spatial awareness and robotic vision sensing systems. They enable ultra-precise camera control for zoom and image stabilization, which are common requirements in robotic vision applications.
Force Torque, Pressure And Tactile Sensing
Force torque, pressure, and tactile sensors bring touch and feel sensing to robots. Though precise joint and limb motor control and vision sensing are vital in robots, the ability to sense how much direct force or rotational torque is being applied to an object by a robot's joint or end-effector is critical.
By accurately measuring the amount of pressure, force and/or torque being applied on a robot's joint, limb or end-effector, the ability to ensure an object being picked up or touched by the robot is not damaged or harmed is immensely improved. Without such touch and feel sensing technology, a robot's productivity is diminished and its safety level compromised.
Next page
Power Management Sensors
Power management is particularly critical in autonomous robots and drones, where these robot types are powered by onboard batteries. Not only is power management critical during the operation of autonomous robots, but also in the re-charging of their batteries. Special care is required in the rate of coulombs being transferred from and to a Lithium-Ion battery, the battery technology commonly used in autonomous robots and drones. Excessive charging amounts or rates, for example, could lead a Lithium-Ion battery to experience thermal runaway and potentially explode. Consequently, accurate coulomb counting and temperature sensing are both critical sensor needs in Lithium-Ion battery energy and thermal management.
Power management is an important function in non-autonomous robots as well, particularly in the areas of voltage regulation, and power and thermal management of robot joint motors. All onboard robot electronics, such as microprocessors, sensors, and actuators, need low-ripple power supplies and regulation to ensure they work efficiently and properly.
The latest in sensor solutions for robot power management include, coulomb counting for the discharging and charging of batteries, precise and reliable over-temperature supervision sensors for voltage regulators, and current sensors in battery management devices.
Other Sensor Technologies Enhancing New Robots
In addition to the four key sensor technologies being designed into next-generation robots, many other additional sensor solutions are being integrated into various robot types. For example, environmental sensors are employed in manufacturing, industrial, mining, agricultural, and security robot market segments. Specific sensor types include air quality and temperature sensors, as well as humidity and barometric sensors, and even lightening detection sensors. Similarly, in the consumer robotic space, gesture and ambient light sensors are selected for improved human machine interfacing.
Conclusion
Clearly, it is the advent of new sensor technology with higher accuracy, smaller footprints, reduced power consumption, and lower costs that is ultimately enabling more useful and productive robots at affordable price points. Combined with state-of-the-art processor technology and intelligent software, robot sensor technology is acting as one of the key accelerants in the white-hot robot market.
About the Author
Mark Donovan is a Senior Product Marketing Manager for ams AG's Position Sensors Business Line. Mark has more than 30 years of industry experience in magnetic sensing, telecom, and radar signal processing, and holds eight patents in magnetic position sensing, radar signal processing, and telecom communications. He holds a Bachelor of Science degree in Electrical Engineering from the University of Massachusetts, Lowell, as well as an MBA from Southern New Hampshire University. Mr. Donovan can be reached via Email at [email protected].
For further information
ams AG
[email protected]
http://www.ams.com
Related Stories
It's 10 O'clock, Do You Know Where Your Robot Is?
Toshiba Machine's BAIII Cartesian Robot Series Eliminates Calibration Steps
IoPT: Add It To Your List of IoXXX Acronyms