Hundreds if not thousands of different kinds of filters have been developed to meet the needs of various applications. Despite this variety, many filters can be described by a few common characteristics. The first of these is the frequency range of their pass band. A filter's pass band is the range of frequencies over which it will pass an incoming signal. Signal frequencies lying outside the pass band are attenuated. Many filters fall into one of the following response categories, based on the overall shape of their pass band.
Low-pass filters pass low-frequency signals while blocking high-frequency signals. The pass band ranges from DC (0 Hz) to a corner frequency FC.
High-pass filters pass high-frequency signals while blocking DC and low-frequency signals. The pass band ranges from a corner frequency (FC) to infinity.
Band-pass filters pass only signals between two given frequencies, blocking lower and higher signals. The pass band lies between two frequencies, FL and FH. Signals between DC and FL are blocked, as are signals from FH to infinity. The pass band of these filters is often characterized as having a bandwidth that is symmetric around a center frequency.
Band-stop filters block signals occurring between two given frequencies, FL and FH. The pass band is split into a low side (DC to FL) and a high side (FH to infinity). For this reason, it's often simpler to specify a band-stop filter by the width and center frequency of its stop band. Band-stop filters are also called notch filters, especially when the stop band is narrow.
Figure 1 shows how each of these filters operates on a swept-frequency input signal.
 Figure 1. Filters are usually characterized by their frequency-domain performance. The effects of a few common filter types on a swept-frequency input signal are shown here. |
In the examples, the signal increases continuously in frequency, from a low frequency to a high frequency. When the signal frequency is within the filter's pass band, the filter passes the signal. As the signal moves out of the pass band, the filter begins to attenuate the signal.
Note that the transition from the pass band to the stop band is a gradual process, where the filter's response decreases continuously. Although you can make this transition arbitrarily sharp (at the cost of filter complexity), it can never be instantaneous, at least not in filters physically realizable with today's technology.
The Bode and Phase Plots
Bode plots describe the behavior of a filter by relating the magnitude of the filter's response (gain) to its frequency. An example of this type of plot is shown in Figure 2.
 Figure 2. Filter responses are plotted on Bode plots, which are log-log charts of gain (expressed in dB) vs. frequency. A filter's Bode plot can show key features of a filter, such as corner frequency, attenuation rate, and pass-band ripple. |
The key feature of this graph is that both axes have logarithmic scales. The horizontal ax[s represents frequency, measured in hertz, and the vertical axis is measured in decibels.
Decibels are a logarithmic measure of power, where an increase of 10 dB represents a 10-fold increase in power. Because power in an electrical signal is related to the square of voltage, a factor of 10 increase in the voltage of a signal is represented by an increment of 20 dB. The advantage of drawing a filter's response curve on a Bode plot is that it provides an easy way to describe the filter's response over several decades of frequency and several orders of magnitude. The decibels of gain of a filter relate to the ratio between input and output voltages:
| (1) |
The low-pass response curve in Figure 2 also illustrates a few characteristics common to many types of filters.
Corner Frequency. Because a real filter rolls off gradually, you usually specify the corner frequency as the frequency at which the response is 1/![]() 2 (0.707) of that in the pass band. Because electronic engineers traditionally describe relative signal strengths in decibels, the frequency is also referred to as the –3 dB point.
2 (0.707) of that in the pass band. Because electronic engineers traditionally describe relative signal strengths in decibels, the frequency is also referred to as the –3 dB point.
Attenuation Rate. The transition between the pass band and the stop band is a continuous function, and the rate at which this transition occurs is a common metric used to select a filter. You commonly express the attenuation rate in decibels per decade, where a decade is a factor of 10 in frequency.
A high attenuation rate helps a filter distinguish between signals of similar frequency and is usually a desirable feature. The attenuation rate is also related to the order of a filter. For a low-pass or a high-pass filter, the attenuation rate will be –20 times the filter's order, in dB/decade. For example, a first-order filter will have an attenuation rate of –20 dB/decade, while a fourth-order filter will have an attenuation rate approaching –80 dB/decade.
Pass-Band Ripple. For many types of filters, the response does not decrease monotonically as frequency moves from the center of the pass band out toward the stop band. The magnitude of the response may vary inside the pass band, and this variation is called the pass-band ripple. Again, this metric is also specified in decibels. Pass-band ripple causes the frequency components of a signal to be amplified to different degrees. This has the effect of distorting the waveform of a signal passing through the filter.
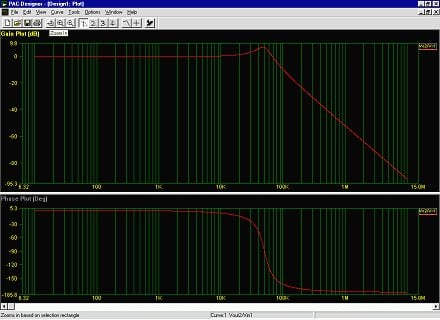
In addition to affecting the amplitude of a signal, a filter can also cause changes in the phase of signal components. Figure 3 shows the amplitude and phase responses of a simple low-pass filter.
 Figure 3. In addition to attenuating a signal based on frequency, a filter can also shift the relative phase of signals at different frequencies. Phase shift is important because it can distort nonsinusoidal signals in inconvenient ways. |
If you run sinusoidal signals of different frequencies through this filter, not only does the filter attenuate the higher frequency
|
signals, but it also shifts their phase.
Note that the phase-shift plot describes the shift of sinusoidal signals. A filter's phase response is also important in the case of nonsinusoidal signals because phase shifts distort the waveforms. This is because nonsinusoidal signals can be viewed as combinations of sinusoidal signals of varying frequencies. Shifting the phase of these components relative to one another will change the shape of the overall waveform.
Filter Circuits 101
Although the design of filter circuits can require sophisticated analysis, you can develop an understanding of the basic concepts with a minimum of math and circuit theory. As a starting point, consider the resistive voltage divider that is shown in Figure 4. The circuit provides an output voltage that is a fixed fraction of the input voltage. The relationship between the input and output voltages is given by:
| (2) |
Because a resistor's characteristics (in the ideal case) don't vary as a function of frequency, the relationship is valid for both DC and AC signals. If the values of the resistors are frequency dependent, however, the ratio of output to input voltage will also become frequency dependent.
If you consider an AC resistance to be the ratio between the voltage across a component and the current through it, then inductors and capacitors exhibit resistances dependent on the frequency of the applied signal. There is a significant difference, however, between the resistance of a resistor and that of an inductor or a capacitor. For sinusoidal signals, voltage and current waveforms are always in phase in a resistor.
In the cases of capacitors and inductors, the current is 90° out of phase with the voltage. The difference is expressed by referring to the resistance of the latter devices as imaginary, and they are represented by using imaginary numbers (j). The term impedance denotes resistances that have imaginary components. For AC signals of frequency f, the complex impedances of resistors (ZR), capacitors (ZC), and inductors (ZL) are given by:
 | (3) |
While a resistor has a constant impedance over frequency, the impedance of a capacitor decreases with increasing frequency while that of an inductor increases.
With the tool of complex impedance, you can analyze the behavior of simple filters based on voltage divider circuits. Consider the circuit shown in Figure 5A, in which a capacitor has been substituted for the lower resistor in a voltage divider.
 Figure 5. By substituting capacitors or inductors for legs of the voltage divider, you can create both high-pass (A, B) and low-pass (D, E) filters. Corner frequencies for (A) and (D) are 1/2 |
As the input signal's frequency increases, the impedance of the capacitor will decrease, resulting in less output signal. By substituting the capacitor's complex impedance for RB, you can express the output voltage in the following way:
 | (4) |
From Equation 4, you can see that at zero frequency (DC) the ratio of output to input is 1, and it decreases as frequency increases. Complex output voltage, however, isn't any more intuitive than complex impedance. By taking the magnitude of Equation 4 (see the sidebar "They Don't Call It Complex Math for Nothing"), you get a relationship that describes the ratio between the magnitudes of the input and output for sinusoidal signals:
| (5) |
When you set f = 1/2![]() RC, the response is 1/
RC, the response is 1/![]() 2, or –3 dB from that of DC. Another feature of this filter is the attenuation rate. As frequency increases above the –3 dB frequency, the response becomes inversely proportional to the frequency. The response decreases a factor of 10 for every factor of 10 increase in frequency, yielding an attenuation rate of –20 dB/decade. Similar analysis can be made for various other simple filters based on voltage division. A low-pass filter based on an inductor is shown in Figure 5B, and two high-pass filters a.e shown in Figures 5D and 5E.
2, or –3 dB from that of DC. Another feature of this filter is the attenuation rate. As frequency increases above the –3 dB frequency, the response becomes inversely proportional to the frequency. The response decreases a factor of 10 for every factor of 10 increase in frequency, yielding an attenuation rate of –20 dB/decade. Similar analysis can be made for various other simple filters based on voltage division. A low-pass filter based on an inductor is shown in Figure 5B, and two high-pass filters a.e shown in Figures 5D and 5E.
Op Amp Filter Circuits
You can perform similar analysis on simple circuits based on implementations other than the voltage divider. For example, another circuit of general interest is a closed-loop amplifier built around an operational amplifier (op amp). This circuit (see Figure 6A) provides a gain of –Rf/Ri, assuming an ideal op amp with infinite gain.
 Figure 6. Filters can also be based on op-amp amplifiers (A). By replacing the resistors with capacitors, you can obtain an integrator (B) and a differentiator (D). Filters using gain elements, such as transistors or op amps, are called active filters. |
If you replace the feedback resistor Rf with a capacitor C, as shown in Figure 6B, the resulting gain vs. frequency is:
| (6) |
The gain for this circuit, like that of the low-pass filter, is inversely proportional to frequency, but it differs in that it increases to infinity for DC signals. Also, because the gain is imaginary, there is always a 90° phase difference between the input and the output (i.e., the circuit will always convert a cos(x) input into a sin(x) output). From a time-domain standpoint, the circuit integrates its input, and for this reason, it is called an integrator.
Replacing the input resistor (Ri) of our original op amp with a capacitor results in a circuit with a response proportional to increasing frequency (see Figure 6D). This circuit takes the derivative vs. time of the input signal, and for this reason, it's called a differentiator.
|
While there are a number of applications in which the straight-line Bode plots of the integrator and differentiator are useful, you can create more interesting filter circuits using series-parallel networks of resistors and capacitors around the op amp. One simple example of such a network is shown in Figure 7. This circuit implements a low-pass filter.
Although this filter uses more components than a simple RC filter, it lets you amplify and filter a signal in one signal-processing stage. Perhaps more importantly, because the output impedance of the op amp is low, you can cascade filter stages without having to worry much about loading effects. With the filter circuits first presented, which don't use op amps, any significant load on the output of the filter could change its frequency response and gain. Filters that contain amplifier circuits, such as the one presented in this section, are called active filters.
Combining Simple Filters
Because you can readily cascade the active filters just described, you can easily predict the behavior of combinations of these filters and use them as building blocks to construct more complex circuits. Two of the simpler combinations are series connections and parallel connections. A series connection of two filters with transfer functions g(f) and h(f) results in an overall transfer function of g(f) × h(f). In a parallel connection, the outputs of the filters are summed, and the filter functions add g(f) + h(f).
By linking low-pass and high-pass filters via a series connection, you can create a band-pass filter if the corner frequency of the low-pass device is greater than that of the high-pass device (see Figure 9A).
 Figure 9. Because active filters often have low output impedances, they are easy to treat as functional blocks and combine them to form more complex filters. Shown are a band-pass filter (A) constructed from a series connection of a low-pass and a high-pass filter, and a band-stop filter (B) constructed from a parallel (summed) combination. |
And you can use the parallel connection to make a band-stop, or notch, filter if the corner frequency of the low-pass filter is lower than that of the high-pass filter (see Figure 9B). Other arrangements based on series and parallel configurations can be used to develop additional filters with more complex characteristics.
One obvious series combination is that of cascading identical low-pass or high-pass sections to get a filter with a steeper attenuation rate. For example, you would expect that cascading two low-pass filters with –20 dB/decade attenuation rates would result in one with a
|
–40 dB/decade attenuation rate. While the ultimate attenuation rate will indeed approach –40 dB/ decade, the sharpness of the filter's "knee" will decrease. This makes it difficult to build a more selective filter by simply cascading identical sections.
Resonant Circuits
What if you replace both resistors in a voltage divider with capacitors and inductors? If you use either just capacitors or just inductors, the imaginary components cancel out, and the circuit behaves much like a resistive voltage divider, at least for AC signals. If you use a capacitor for one leg and an inductor for the other (see Figure 11A), new behavior emerges. If you substitute the imaginary impedances into the voltage divider equation, you obtain:
 | (14) |
The response of this circuit is completely real—meaning there's no phase shift between input and output. It's also a low-pass filter because the response is unity (1) at DC and drops to zero as frequency is increased. If you set f = 1/2![]()
![]() LC, however, the denominator of the response equation goes to zero, implying that you get infinite output voltage for a finite input voltage. Although an actual circuit wouldn't produce an infinite output voltage, the peak can still be quite high, with a maximal response occurring when f = 1/2
LC, however, the denominator of the response equation goes to zero, implying that you get infinite output voltage for a finite input voltage. Although an actual circuit wouldn't produce an infinite output voltage, the peak can still be quite high, with a maximal response occurring when f = 1/2![]()
![]() LC. This frequency is called the circuit's resonant frequency.
LC. This frequency is called the circuit's resonant frequency.
Resonance is a phenomenon that is qualitatively different from that which can be obtained in a passive filter circuit consisting of only resistors and capacitors. If you plot the LC circuit's time-domain response to a step input, you see that it oscillates, or rings. Resonance results because electrical energy is periodically transferred back and forth between two or more circuit elements—the inductor and the capacitor in the above case. Energy in a passive RC or RL circuit, however, only flows in one direction as the circuit moves toward a steady state. For this reason, these circuits don't oscillate.
One useful feature of LC filter circuits is that they have steeper attenuation rates (e.g., –40 dB/decade) than RC filters. This stems from the fact that the circuits have responses that vary at a rate of 1/f2 instead of 1/f. While you can get this attenuation rate by cascading two RC filters, as discussed above, the LC circuit's resonant peak allows for a sharper "knee" at the frequency where the filter transitions from pass band to stop band. By inserting a resistor in series with the inductor, the magnitude of the response peak can be reduced, or damped, to control the sharpness of the knee. The degree of peaking in a resonant filter can be quantified by a measure known as the filter's Q. For the case of the RLC low-pass filter shown above, Q is given by:
| (18) |
With RLC filters, you can also get low-pass, high-pass, band-pass, and band-stop functions by rearranging the circuit elements. Figure 14 shows the circuit configuration for these filters.
 Figure 14. You can use simple RLC circuits to implement low-pass (A), high-pass (B), band-pass (C), and band-stop (D) filters. Adding the resistor lets you control the degree to which the filter's response will peak at its resonant frequency. |
Active Filters Revisited
RLC passive filters are widely used because many applications require filters with high attenuation rates and sharp knees. Unfortunately, you need one or more inductors to implement an RLC filter. Compared with resistors and capacitors, inductors tend to be large, expensive, and have poor tolerances. Additionally, because inductors generate magnetic fields, they can cause unwanted interference with other nearby components.
|
Fortunately, you can build circuits that have resonance by using different circuit topologies consisting only of resistors, capacitors, and amplifiers. One such set of topologies is called voltage-controlled voltage source (VCVS) filters, of which low-pass and high-pass versions are shown in Figure 16.
Both these circuits provide filters with –40 dB/decade attenuation rates and sharper corners than a cascade of two first-order filters. In each, the op amp acts as a noninverting amplifier with a greater-than-unity gain. The gain of the amplifier is determined by (R3 + R4)/R3.
From an intuitive standpoint, you can see that the circuit shown in Figure 16A has gain at DC and rolls off as the frequency increases. This circuit will behave as a low-pass filter. Similarly, because the circuit in Figure 16B has its capacitors in the signal path, it will have zero response at DC, and the response will increase as frequency increases.
Both the corner frequency and Q of each of these filters is determined by the values of the capacitors (C1 and C2), the resistors (R1 and R2), and the amplifier gain. For a filter with a maximally flat pass band and a corner frequency of 1/2![]() RC, the amplifier gain should be set to 1.586, R1 = R2 =R, and C1 = C2 = C.
RC, the amplifier gain should be set to 1.586, R1 = R2 =R, and C1 = C2 = C.
|
A disadvantage of the VCVS filters described here is that the pass-band gain is not necessarily equal to one. When unity pass-band gain is needed, you can wire the amplifier as a unity-gain follower. This circuit is called a Sallen and Key filter, and the low-pass case is shown in Figure 17. Assuming that R1 = R2 =R and C1 = C2 = C, the corner frequency of this particular filter is given by f = 1/2![]() RC and the attenuation rate of the circuit will also approach –40 dB/decade.
RC and the attenuation rate of the circuit will also approach –40 dB/decade.
Although the above examples are of relatively simple second-order filters, they can be used as building blocks to construct filters of higher order and sharper knees. The theory of how to specify and design these higher order filters, however, is far beyond the scope of this article.
SIDEBARS:
|
|
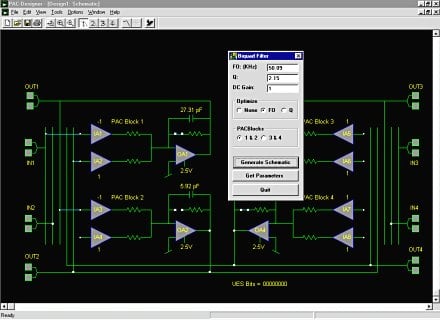
By invoking the Biquad design macro, you can specify the corner frequency and the Q for a desired biquad, click a single button, and have an optimal design transferred into PAC-Designer's design screen. Simulation and validation of a proposed design can be performed in the PAC-Designer environment in a matter of seconds. When a suitable design has been determined, you can transfer it into silicon with one more mouse click. The total time required to go from a specification to working silicon can be less than five minutes.
Additional design macros provided with PAC-Designer also let you design, evaluate, and implement more complex, higher order filters in a similar manner.
|