
Engineers faced with this challenge often arrive at solutions that offer, at best, a compromise in terms of optimum vibration control, overall system performance, energy efficiency, and cost. Many system designers have therefore come to accept such compromises as givens. To arrive at significant design improvements, engineers might begin by first questioning some of these "givens."
The Walking Washing Machine
The common household washing machine represents a standard compromise between controlling vibration associated with the spin cycle and achieving optimum system performance and efficiency. The tub in a conventional machine is suspended by a number of coil springs that provide mechanical support as well as vibration isolation at high frequency. To prevent potentially damaging vibratory excursions when the drum velocity passes through resonance as it accelerates during the ramp-up to the spin cycle, static vibration dampers are added to the suspension.
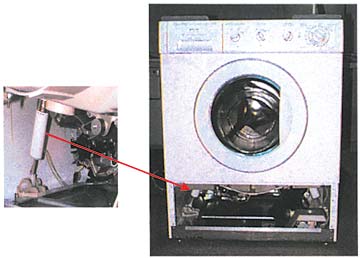 A variable damping system based on magnetorheological fluid sponges can help control the vibratory motion of a household washing machine during its spin cycle. Damping is switched on as the drum passes through resonance and off again at the highest speeds for optimum vibration isolation. The system permits the drum to rotate at speeds high enough to function as a centrifuge, but without the violent shaking familiar to every user. |
This arrangement represents a compromise; while conventional dampers easily control the tub's motion at resonance, they can significantly degrade high-speed vibration isolation. This tendency limits the size of the tub and to some extent dictates the dimensions of the housing that must accommodate the overall motion of the tub.
In terms of the machine's overall performance, static damping draws energy from the motor that might otherwise go toward maximizing spin speeds for optimum water removal from clothes and shortened drying time. So can vibration control, performance, and energy efficiency be improved without raising the price of the appliance to more than the average consumer is willing to pay?
The European Response
European manufacturers of horizontal-axis, front-loading washing machines are pushing for increased performance and efficiency. Smaller in load capacity and typically installed in apartment kitchens, these machines are being designed for maximum energy efficiency and quiet operation (in small spaces and high-occupancy buildings, neighbors are never far away).
Because many households have only a washing machine and not a dryer, tub speeds are reaching 2000 rpm, effectively becoming centrifuges that remove almost all the water from the washload. In fact, manufacturers have had to reduce the size of the drain holes in the tub to prevent extrusion of small items of clothing during the spin cycle.
To achieve this level of performance, manufacturers have incorporated a controllable damping system designed around magnetorheological (MR) fluid (see Figure 1).
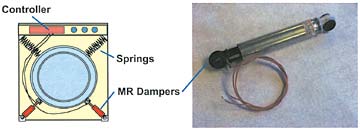 Figure 1. Conventional springs and magnetorheological dampers work together to stabilize a home washing machine during the spin cycle. The dampers control vibrations as the tub passes through resonance; at the highest speeds the dampers are switched off and vibration isolation is provided by the mechanical springs that support the tub. |
These can simply be turned off at high spin speeds for an increased degree of vibration isolation.
Advantages of MR Damping
The MR fluid sponge damper requires neither seals nor bearings, and uses the same inexpensive components found in existing passive dampers, but with a few important modifications. The damper consists of a layer of open-celled, polyurethane foam, or other suitable absorbent matrix materials, saturated with ~3 ml of MR fluid surrounding a steel bobbin and coil (see Figure 2).
 Figure 2. A simple, inexpensive magnetorheological fluid sponge designed for incorporation into washing machines consists of a steel bobbin and coil surrounded by a layer of foam saturated with MR fluid. The elements constitute a piston on the end of the shaft that is free to move axially inside a steel housing that provides the magnetic flux return path. The damping force is proportional to the sponge's active area. |
Together these elements form a piston on the end of the shaft that is free to move axially inside a steel housing that provides the magnetic flux return path. Damping force is proportional to the sponge's active area.
The application of a magnetic field causes the MR fluid in the matrix to develop a yield strength and resist shear motion. The amount of force produced is proportional to the area of active MR sponge that is exposed to the magnetic field. This arrangement can be applied in both linear and rotary configurations wherever a direct shear mode of operation would be used.
During passage through resonance, these controllable dampers may be energized to provide a high level of damping that totally controls the excursions of the tub (see Figure 4).
 Figure 4. By activating the damper while the washing machine tub is passing through resonance, a degree of vibration control is achieved not possible with conventional springs alone. The damping mechanism is switched off at the greatest speeds, when the mechanical springs provide vibration isolation. |
At high speed, the MR sponge dampers are turned off to enable a high level of vibration isolation. With enhanced vibration control, the drum may be made larger or the housing smaller since it must accommodate less overall tub motion. Ideally, each of a pair of controllable dampers would have to provide 50–150 N of damping force when energized and a low residual force of <5 N when turned off.
The power requirements for controllable MR fluid dampers are so low that a net energy saving might be realized. Effective resonance control typically requires ~10 W of input power to the MR dampers for ~5–10 s, as the drum speed ramps through criticality. The amount of power is readily available from existing onboard electronics in a standard machine. Only a low-cost relay, associated with the wash cycle timer, is required. The removal of damping when the machine is in its high-speed spin phase translates into a decrease in power consumption on the part of the motor. With conventional passive dampers, the motor is required to work against the force of the dampers to achieve the same spin speeds (see Figure 5).
 Figure 5. The rotational motion of the inner drum or agitator in a washing machine, along with any load imbalance, creates a disturbing force that excites vibratory motion of the tub that can become excessive when the drum speed is near or at resonance. |
The simplicity of this approach to a common design problem opens the doors to additional, perhaps unanticipated opportunities. For example, in the quest for maximized energy efficiency, washing machines are being designed, and are rated by their ability, to use only the amount of water and detergent necessary to clean a load of clothes. The goal is to weigh and wash a single silk shirt efficiently. Conventional, passive dampers create barriers that prevent a machine from accurately weighing loads before washing; controllable dampers remove that barrier with no added costs.
Summary
Many of the benefits of passive damping schemes built around MR technology are intuitive:
- Efficiency
- Washing machines achieve greater performance in terms of higher spin speeds without the increased energy consumption of more powerful motors.
- Energy efficiency is enhanced because clothes come out drier.
- With heightened vibration control, tubs can be designed larger and the housing smaller.
- Machines can accurately weigh loads and thus control the use of water and detergent.
- Functionality
- The damping system uses onboard electronics.
- No additional operator control is required.
- MR provides real-time controllability.
- Cost
- Because existing materials are used, the slight increase in materials cost is balanced by improved energy efficiency.
- Because existing materials are used, the slight increase in materials cost is balanced by improved energy efficiency.
- System Integration
- Additional electronic controls are easily adaptable to the existing machine's electronics footprint.
In addition to cost-sensitive applications such as washing machines, MR fluid dampers are being used in rotary brakes for exercise equipment and pneumatic systems; in complete semiactive damper systems for heavy-duty truck seat suspensions; in adjustable linear shock absorbers for racing cars; and in semiactive suspensions for passenger cars.
Now under commercial development are very large MF fluid dampers designed for seismic damage mitigation in civil engineering structures such as buildings and bridges.
Finally, the technology is being investigated for applications in vehicular steer-by-wire devices and medical equipment such as the joints of prosthetic limbs.
The key to success in all of these implementations is the ability of MR fluid to rapidly change its rheological properties upon exposure to an applied magnetic field.
|
|