
- The most important specifications to keep in mind when selecting a humidity sensor are:
- Accuracy
- Repeatability
- Interchangeability
- Long-term stability
- Ability to recover from condensation
- Resistance to chemical and physical contaminants
- Size
- Packaging
- Cost effectiveness
Additional significant long-term factors are the costs associated with sensor replacement, field and in-house calibrations, and the complexity and reliability of the signal conditioning and data acquisition (DA) circuitry. For all these considerations to make sense, the prospective user needs an understanding of the most widely used types of humidity sensors and the general trend of their expected performance. Definitions of absolute humidity, dew point, and relative humidity are provided in the sidebar, "Humidity Basics").
Capacitive Humidity Sensors
Relative Humidity. Capacitive relative humidity (RH) sensors (see Photo 1) are widely used in industrial, commercial, and weather telemetry applications.
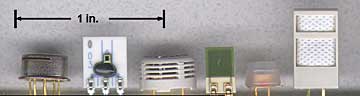 Photo 1. Capacitive RH sensors are produced in a wide range of specifications, sizes, and shapes including integrated monolithic electronics. The sensors shown here are from various manufacturers. |
They consist of a substrate on which a thin film of polymer or metal oxide is deposited between two conductive electrodes. The sensing surface is coated with a porous metal electrode to protect it from contamination and exposure to condensation. The substrate is typically glass, ceramic, or silicon. The incremental change in the dielectric constant of a capacitive humidity sensor is nearly directly proportional to the relative humidity of the surrounding environment. The change in capacitance is typically 0.2–0.5 pF for a 1% RH change, while the bulk capacitance is between 100 and 500 pF at 50% RH at 25°C. Capacitive sensors are characterized by low temperature coefficient, ability to function at high temperatures (up to 200°C), full recovery from condensation, and reasonable resistance to chemical vapors. The response time ranges from 30 to 60 s for a 63% RH step change.
State-of-the-art techniques for producing capacitive sensors take advantage of many of the principles used in semiconductor manufacturing to yield sensors with minimal long-term drift and hysteresis. Thin film capacitive sensors may include monolithic signal conditioning circuitry integrated onto the substrate. The most widely used signal conditioner incorporates a CMOS timer to pulse the sensor and to produce a near-linear voltage output (see Figure 1).
 Figure 1. A near-linear response is seen in this plot of capacitance changes vs. applied humidity at 25°C. The term "bulk capacitance" refers to the base value at 0% RH. |
The typical uncertainty of capacitive sensors is ±2% RH from 5% to 95% RH with two-point calibration. Capacitive sensors are limited by the distance the sensing element can be located from the signal conditioning circuitry, due to the capacitive effect of the connecting cable with respect to the relatively small capacitance changes of the sensor. A practical limit is <10 ft.
Direct field interchangeability can be a problem unless the sensor is laser trimmed to reduce variance to ±2% or a computer-based recalibration method is provided. These calibration programs can compensate sensor capacitance from 100 to 500 pF.
Dew Point. Thin film capacitance-based sensors provide discrete signal changes at low RH, remain stable in long-term use, and have minimal drift, but they are not linear below a few percent RH. These characteristics led to the development of a dew point measuring system incorporating a capacitive sensor and microprocessor-based circuitry that stores calibration data in nonvolatile memory. This approach has significantly reduced the cost of the dew point hygrometers and transmitters used in industrial HVAC and weather telemetry applications.
The sensor is bonded to a monolithic circuit that provides a voltage output as a function of RH. A computer-based system records the voltage output at 20 dew point values over a range of –40°C to 27°C. The reference dew points are confirmed with a NIST-traceable chilled mirror hygrometer. The voltage vs. dew/frost point values acquired for the sensor are then stored in the EPROM of the instrument. The microprocessor uses these values in a linear regression algorithm along with simultaneous dry-bulb temperature measurement to compute the water vapor pressure.
Once the water vapor pressure is determined, the dew point temperature is calculated from thermodynamic equations stored in EPROM. Correlation to the chilled mirrors is better than ±2°C dew point from –40°C to –7°C and ±1°C from –7°C to 27°C. The sensor provides long-term stability of better than 1.5°C dew point drift/yr. Dew point meters using this methodology have been field tested extensively and are used for a wide range of applications at a fraction of the cost of chilled mirror dew point meters.
Resistive Humidity Sensors
Resistive humidity sensors (see Photo 2) measure the change in electrical impedance of a hygroscopic medium such as a conductive polymer, salt, or treated substrate.
 Photo 2. Resistive sensors are based on an interdigitated or bifilar winding. After deposition of a hydroscopic polymer coating, their resistance changes inversely with humidity. The Dunmore sensor (far right) is shown 1/3 size. |
The impedance change is typically an inverse exponential relationship to humidity (see Figure 2).
 Figure 2. The exponential response of the resistive sensor, plotted here at 25°C, is linearized by a signal conditioner for direct meter reading or process control. |
Resistive sensors usually consist of noble metal electrodes either deposited on a substrate by photoresist techniques or wire-wound electrodes on a plastic or glass cylinder. The substrate is coated with a salt or conductive polymer. When it is dissolved or suspended in a liquid binder it functions as a vehicle to evenly coat the sensor. Alternatively, the substrate may be treated with activating chemicals such as acid. The sensor absorbs the water vapor and ionic functional groups are dissociated, resulting in an increase in electrical conductivity. The response time for most resistive sensors ranges from 10 to 30 s for a 63% step change. The impedance range of typical resistive elements varies from 1 k![]() to 100 M
to 100 M![]() .
.
Most resistive sensors use symmetrical AC excitation voltage with no DC bias to prevent polarization of the sensor. The resulting current flow is converted and rectified to a DC voltage signal for additional scaling, amplification, linearization, or A/DRconversion (see Figure 3).
 Figure 3. Resistive sensors exhibit a nonlinear response to changes in humidity. This response may be linearized by analog or digital methods. Typical variable resistance extends from a few kilohms to 100 MV. |
Nominal excitation frequency is from 30 Hz to 10 kHz.
The "resistive" sensor is not purely resistive in that capacitive effects >10–100 M![]() makes the response an impedance measurement. A distinct advantage of resistive RH sensors is their interchangeability, usually within ±2% RH, which allows the electronic signal conditioning circuitry to be calibrated by a resistor at a fixed RH point. This eliminates the need for humidity calibration standards, so resistive humidity sensors are generally field replaceable. The accuracy of individual resistive humidity sensors may be confirmed by testing in an RH calibration chamber or by a computer-based DA system referenced to standardized humidity-controlled environment. Nominal operating temperature of resistive sensors ranges from –40°C to 100°C.
makes the response an impedance measurement. A distinct advantage of resistive RH sensors is their interchangeability, usually within ±2% RH, which allows the electronic signal conditioning circuitry to be calibrated by a resistor at a fixed RH point. This eliminates the need for humidity calibration standards, so resistive humidity sensors are generally field replaceable. The accuracy of individual resistive humidity sensors may be confirmed by testing in an RH calibration chamber or by a computer-based DA system referenced to standardized humidity-controlled environment. Nominal operating temperature of resistive sensors ranges from –40°C to 100°C.
In residential and commercial environments, the life expectancy of these sensors is >>5 yr., but exposure to chemical vapors and other contaminants such as oil mist may lead to premature failure. Another drawback of some resistive sensors is their tendency to shift values when exposed to condensation if a water-soluble coating is used. Resistive humidity sensors have significant temperature dependencies when installed in an environment with large (>10°F) temperature fluctuations. Simultaneous temperature compensation is incorporated for accuracy. The small size, low cost, interchangeability, and long-term stability make these resistive sensors suitable for use in control and display products for industrial, commercial, and residential applications.
One of the first mass-produced humidity sensors was the Dunmore type, developed by NIST in the 1940s and still in use today. It consists of a dual winding of palladium wire on a plastic cylinder that is then coated with a mixture of polyvinyl alcohol (binder) and either lithium bromide or lithium chloride. Varying the concentration of LiBr or LiCl results in very high resolution sensors that cover humidity spans of 20%–40% RH. For very low RH control function in the 1%–2% RH range, accuracies of 0.1% can be achieved. Dunmore sensors are widely used in precision air conditioning controls to maintain the environment of computer rooms and as monitors for pressurized transmission lines, antennas, and waveguides used in telecommunications.
The latest development in resistive humidity sensors uses a ceramic coating to overcome limitations in environments where condensation occurs. The sensors consist of a ceramic substrate with noble metal electrodes deposited by a photoresist process. The substrate surface is coated with a conductive polymer/ceramic binder mixture, and the sensor is installed in a protective plastic housing with a dust filter.
The binding material is a ceramic powder suspended in liquid form. After the surface is coated and air dried, the sensors are heat treated. The process results in a clear non-water-soluble thick film coating that fully recovers from exposure to condensation (see Figure 4).
 Figure 4. After water immersion, the typical recovery time of a ceramic-coated resistive sensor to its pre-immersion, 30% value is 5-15 min., depending on air velocity. |
The manufacturing process yields sensors with an interchangeability of better than 3% RH over the 15%–95% RH range. The precision of these sensors is confirmed to ±2% RH by a computer-based DA system. The recovery time from full condensation to 30% is a few minutes. When used with a signal conditioner, the sensor voltage output is directly proportional to the ambient relative humidity.
Thermal Conductivity Humidity Sensors
These sensors (see Photo 3) measure the absolute humidity by quantifying the difference between the thermal conductivity of dry air and that of air containing water vapor.
 Photo 3. For measuring absolute humidity at high temperatures, thermal conductivity sensors are often used. They differ in operating principle from resistive and capacitive sensors. Avbsolute humidity sensors are left and center; thermistor chambers are on the right. |
When air or gas is dry, it has a greater capacity to "sink" heat, as in the example of a desert climate. A desert can be extremely hot in the day but at night the temperature rapidly drops due to the dry atmospheric conditions. By comparison, humid climates do not cool down so rapidly at night because heat is retained by water vapor in the atmosphere.
Thermal conductivity humidity sensors (or absolute humidity sensors) consist of two matched negative temperature coefficient (NTC) thermistor elements in a bridge circuit; one is hermetically encapsulated in dry nitrogen and the other is exposed to the environment (see Figure 5).
 Figure 5. In thermal conductivity sensors, two matched thermistors are used in a DC bridge circuit. One sensor is sealed in dry nitrogen and the other is exposed to ambient. The bridge output voltage is directly proportional to absolute humidity. |
When current is passed through the thermistors, resistive heating increases their temperature to >200°C. The heat dissipated from the sealed thermistor is greater than the exposed thermistor due to the difference in the thermal conductively of the water vapor as compared to dry nitrogen. Since the heat dissipated yields different operating temperatures, the difference in resistance of the thermistors is proportional to the absolute humidity (see Figure 6).
 Figure 6. The output signal of the thermal conductivity sensor is affected by the operating temperature. Maximum output is at 600°C; output at 200°C drops by 70%. |
A simple resistor network provides a voltage output equal to the range of 0–130 g/m3 at 60°C. Calibration is performed by placing the sensor in moisture-free air or nitrogen and adjusting the output to zero. Absolute humidity sensors are very durable, operate at temperatures up to 575°F (300°C) and are resistant to chemical vapors by virtue of the inert materials used for their construction, i.e., glass, semiconductor material for the thermistors, high-temperature plastics, or aluminum.
An interesting feature of thermal conductivity sensors is that they respond to any gas that has thermal properties different from those of dry nitrogen; this will affect the measurements. Absolute humidity sensors are commonly used in appliances such as clothes dryers and both microwave and steam-injected ovens. Industrial applications include kilns for drying wood; machinery for drying textiles, paper, and chemical solids; pharmaceutical production; cooking; and food dehydration. Since one of the by-products of combustion and fuel cell operation is water vapor, particular interest has been shown in using absolute humidity sensors to monitor the efficiency of those reactions.
In general, absolute humidity sensors provide greater resolution at temperatures >200°F than do capacitive and resistive sensors, and may be used in applications where these sensors would not survive. The typical accuracy of an absolute humidity sensor is +3 g/m3; this converts to about ±5% RH at 40°C and ±0.5% RH at 100°C.
Summary
Rapid advancements in semiconductor technology, such as thin film deposition, ion sputtering, and ceramic/silicon coatings, have made possible highly accurate humidity sensors with resistance to chemicals and physical contaminants?at economical prices. No single sensor, however, can satisfy every application. Resistive, capacitive, and thermal conductivity sensing technologies each offer distinct advantages. Resistive sensors are interchangeable, usable for remote locations, and cost effective. Capacitive sensors provide wide RH range and condensation tolerance, and, if laser trimmed, are also interchangeable. Thermal conductivity sensors perform well in corrosive environments and at high temperatures. For most applications, therefore, the environmental conditions dictate the sensor choice.
|