
|

Hall elements are located at the four quadrants of the disk to provide X and Y outputs (see Figure 1).
 Figure 1. The integrated ferromagentic concentrator is located at the center of the silicon die and the Hall elements are at the edges of the disk (A). Parallel flux fields are converted to perpendicular flux fields that are sensed by the Hall elements (B). A layout detail showing the four sets of Hall elements with p/2 shift is shown in (C). |
Only one Hall element is required for each axis, but additional gain can be realized and offset reduced by measuring the differential voltages from two devices at each quadrant position. The differential outputs from the X1, X2 and Y1, Y2 Hall elements are processed by the integrated electronic circuitry and include biasing, amplification, offset cancellation, and temperature stabilization functions.
Full-scale linear outputs of 2.5 V ±2.0 V can be obtained at field strengths as low as 20 mT (200 G). The Vx and Vy outputs are balanced with minimal offsets; because of the single-die construction they are not only matched, but also have excellent tracking performance. Several unique performance characteristics inherent in the technology make it especially well suited for precision sensing applications: a nonlinearity <0.1% and hysteresis <0.03%.
|
 Figure 3. The outputs from the 2-axis IC are processed by a microcontroller to create an output proportional to the angle of rotation (A). Linear output voltage is a function of Vx (cosine) and Vy (sine) (B). |
|
Vx = Sx × B × cos Vx = Sx × B × sin |
(1) |
The IC gain sensitivities, Sx and Sy, are closely matched and track over temperature. We can therefore assume that Sx and Sy are equal:
|
if Sx = Sy = S, then Vy/Vx = S × B × sin |
(2) |
|
and therefore, |
(3) |
|
(Vx >0, Vy >0), |
(4) |
|
(Vx = 0, Vy >0), |
(5) |
|
(Vx <0), |
(6) |
|
(Vx = 0, Vy <0), |
(7) |
|
(Vx >0, Vy <0), |
(8) |
The potential variability resulting from changes in S or B are canceled out by dividing Vy by Vx. Therefore, the
|
The magnet creates a DC field that will project through any nonferromagnetic material, such as aluminum, 300 series stainless steel, and plastics. Because of this, the 2-axis IC and associated electronics can be mounted in a hermetically sealed metal housing that
|
Having to incorporate a microcontroller to calculate the angle might be considered a negative, but with the microcontroller and the 360° information from the IC, the potential sensor solutions are numerous and functionality is greatly expanded. Any custom output curve can be programmed; outputs can be analog, PWM, PPM, or serial data. Mechanical alignment of the magnet to the sensor can be eliminated by simply resetting the starting point within the 360° range.
|
|
Vout = arctan (Vy/Vx) |
(9) |
|
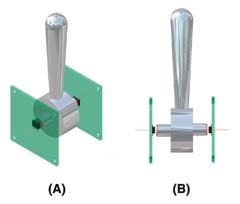
The X and Y outputs from the IC are proportional to the vector of the magnetic field. The profile of this vector is a sine wave with the field vector in the X,Y plane, being zero when the joystick is in its neutral position (see Figure 8).
 Figure 8. The magnet is rotated around the two-axis IC located at the center of spherical rotation (A). The voltage output generated by the rotating magnet is a sine wave with zero output located at the joystick's center position (B). An expanded view of the sine wave shows the ~60º linear range centered around the 0º angle. The nonlinearity, shown in red, is <1% of F.S. (C). |
A sine wave has a linear range of <1% nonlinearity over a 0°?60° range around the 0° angle. Because most joystick applications have a typical operating range of ±30°, the linear output voltage generated by this Hall sensor works well in simple, noncontact 2-axis joystick applications. No calculations are required, and the X and Y outputs are directly proportional to the magnet strength and IC sensitivity so can be used directly as shown in Figure 9. Depending on accuracy requirements, the output levels may have to be calibrated to the mechanical position to compensate for variability in B and circuit sensitivity.
 Figure 9. Linear outputs from the 2-axis IC provide X and Y outputs from the joystick's ±30º stroke. The 2.5 V ±2.0 V outputs are referenced to the IC's 1/2 Vdd (2.5 V) reference voltage. The oututs are ratiometric to the supply voltage. |
High-Resolution Sensor. Figure 10 illustrates a way to obtain higher resolution and improved accuracy in a rotary position sensor by using two X,Y ICs and two magnets.
 Figure 10. A multipole and a single pole pair magnet are used to generate fine and coarse measurements of the angular position. The multipole sensor is located at the circumference of the magnet, and the coarse sensor is on the axis of rotation (A). The basic circuit to process the signals from the two ICs is shown in (B). |
The magnet associated with the IC on the lower PCB is a single pole pair magnet that provides a coarse measurement by producing one electrical cycle of sine and cosine signals per revolution. The magnet associated with the IC on the upper PCB is a multiple ring magnet and provides a fine measurement by producing n electrical cycles of sine and cosine signals per revolution, where n = number of pole pairs (see Figure 11).
 Figure 11. As can be seen in this graph, for every full resolution one cycle of sine and cosine signals is generated from the coarse sensor while eight cycles of sine and cosine are generated from the fine sensor. |
Each electrical cycle has a resolution of 0.1°, so the total resolution for one complete revolution is 0.1°/n. If n = 8 pole pairs, the resolution becomes 0.1°/8 = 0.0125°, or 45 arc-seconds. The coarse information from the lower PCB is used to locate which sector (pole pair) of the multipole ring magnet is in front of the upper PCB IC.
Within one pole pair, or measurement range of 360°/n, the accuracy is also improved by n: accuracy = 0.5°/n and overall accuracy of one 360° revolution can be significantly enhanced with electronic calibration. The fine and coarse signals are processed by a microcontroller to generate an output with greater resolution and accuracy.
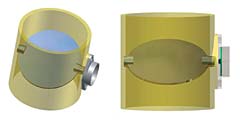
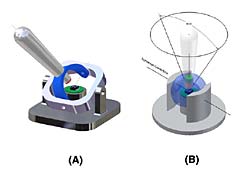
Compass. Another unique application is an electronic compass (see Figure 12), in which the IC is mounted over a mechanism that allows a free-floating magnet.
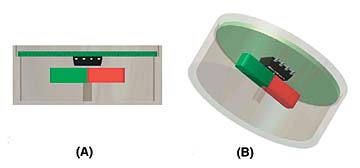 Figure 12. A side view shows the north-seeking magnet just below the 2-axis sensor, which senses magnetic fields parallel to the magnet. As the magnet rotates, the sensor generates sine and cosine signals at the Vx and Vy outputs, which can be converted to the absolute position of the magnet (A). The Earth's field-seeking magnet is mounted on a low drag bearing assembly to allow free movement (B). |
As the magnet rotates and aligns with the Earth?s magnetic field, it creates a field vector that is aligned with the orientation of the magnet. The magnet?s field strength is much stronger than Earth?s, which is only about 60 µT (600 mG) and too low compared to the sensor full-scale range. The magnet?s stronger field can be detected by the sensor, and its horizontal flux lines generate sine and cosine voltage signals at the IC?s Vx and Vy outputs as the compass magnet moves about the center of rotation. As with the angular sensor described above, these output signals can be converted to an analog or digital voltage proportional to the angle ![]() :
:
|
Vout = arctan (Vy/Vx) |
(10) |
Brushless DC Motor Control. By placing a 2-axis linear Hall on the end of a brushless DC motor and inserting a magnet into the
|
Summary
Simultaneously sensing two components of a magnetic field at the same point with a single integrated SOIC is a unique capability that can solve numerous noncontact rotary position problems. This article focused on rotary position sensing, but the technology has other uses as well, including single-axis linear sensing, 2-axis linear position sensing, and surface flux anomaly detection.